What does inertia have to do with controlling power system frequency?
Surprisingly, not much.
Some carefully selected analogies might make the reasons for this clearer.
Is it easier or harder to control the speed of a motor cycle or a heavily loaded truck?
Most people would correctly surmise that it is easier to control the speed of a motor cycle because it has less inertia – but we are being told by various reports (e.g. The recent Finkel review into the Australian National grid, and prior reports released by AEMO etc.) that we need to place limits on the minimum amount of inertia on power systems.
Is this emphasis on inertia misplaced? I believe it is.
Objects with large inertia want to keep moving (or rotating) at the same speed and as a result it needs large amounts of force to slow or speed things up. AC power systems are designed to operate at a constant speed, we sometimes refer to this as “frequency”, but this translates directly to the speed that rotating devices such as motors or generators operate at.
Therefore, the degree to which external forces can change the system frequency is inversely proportional to how much inertia is on the system. So, the reasoning goes, if you want constant system frequency set up the system have as much inertia as possible, this means it takes more force to change it.
This simplistic approach seems to me to be misguided.
If implemented it could place onerous restrictions on the connection of renewable energy sources, in particular power stations of solar photovoltaic design which have no rotating parts and hence no inertia.
Perhaps we should examine this industry wide preoccupation with inertia a bit more critically.
The reason controlling the speed of a motor cycle is easier than controlling the speed of a truck is due to the responsiveness of the throttle/engine combination. Although a truck engine is more powerful than that of a motor cycle, the power to weight ratio is typically much less. This allows motor cycles to accelerate much faster than heavily laden trucks.
It is not inertia that allows constant speed, it is the effectiveness of the throttle/engine combination, the effectiveness of the control system.
In power system subjects, the terminology for “throttle” is “governor” and “engine” is usually referred to as “turbine”, although this depends on the details of the actual technology used to drive the generator. So the main thing that controls the speed, (which is the frequency) of an electrical power system are the governor controls.
Most of the points I want to make in this blog have already been made. The discussion below will be a slightly more technical and will include a few equations which will turn off some readers, but I hope you will persevere because the technicalities of an issue sometimes matter.
For experts in the subject the discussion below will be too simplistic but I ask them to remember that this is a blog, not a textbook.
Governor Control systems 101
In power systems theory, generator/turbine inertia is represented by the symbol H. The relationship between the power mismatch and the speed deviation is usually represented as 1/(2 H s) , s being a Laplace transform variable. With no governor control system if there is a power mismatch the frequency will ramp in proportion to the power mismatch, and inversely proportional to the inertia.
In calculus terms, the output (frequency deviation) signal is the integral of the input power mismatch – the inertia H being the constant which determines the slope of the ramp.
Large inertia implies lower gradient ramping relative to a small inertia.

Note: – it is not possible to limit the frequency deviation by inertia alone, a power mismatch will cause the frequency deviation to ramp until something malfunctions and the power system collapses resulting in a blackout.
To stop the frequency from continuing to ramp, you need governor control systems.
The governor measures the speed of the turbine and feeds back a correcting power signal to the input. This is a well-known technique for control systems and is used in virtually every technology you could name, e.g. process controls, electronic amplifiers, aircraft, space craft, steam engines etc.etc.

When you do the math represented by the inertia and the governor in the algebraic/block diagram formalism of Laplace transforms you get this:
∆f/∆P = 1/(2 H s)/(1+Gov(s) 1/(2 H s))
Translating the math to physics means the governor limits the frequency ramping – depending on the governor design parameters this can be made to return the frequency to its original value (this is known as isochronous governing), or just to limit the final variation to a finite amount.
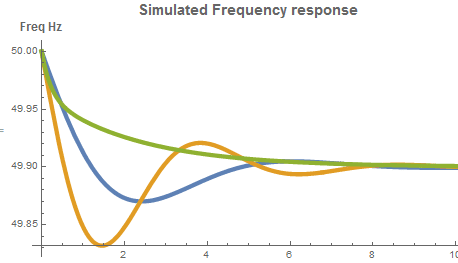
The point of introducing the control system algebraic formalism is to show what happens if the inertia is made smaller. Below I have created three arbitrary systems and calculated the response of each. The only difference between the first and second cases of calculated simulations is that the assumed inertia is halved in the second case. For the third case I modified the governor parameters to change the response of the second case.

As you can see, whilst the frequency initially changes more quickly in the second case (lighter inertia) the frequency excursion is slightly more, but control is established quickly and the final frequency deviation is exactly the same. This is not surprising for a control system engineer, in effect reducing the inertia has (in control system theory parlance) increased the closed loop gain. This has the effect of speeding up the response and making it more oscillatory. However this is easily fixed by making some minor changes to the governor responses.
We have ended up with a system of lower inertia which has a better response.
So in actual fact reducing system inertia and retuning the governor has actually made things a better with respect to frequency control.
The mathematics shows it is easier to control the speed of motor cycles than it is for trucks.
There are small scale power systems in operation which have effectively no inertia, so in theory and in practice it is possible to design a large scale power system along similar lines. It won’t happen overnight, but it is possible to design and operate a national power system with no inertia. A good project for the 22nd century perhaps.
In the meantime we have a system which is changing its inertia as the mix of generation changes. Does this mean the system characteristics change? Obviously.
Is it a system security concern? Not necessarily, but it does need suitably qualified power system engineers to keep an eye on it.
What needs to be done? Well in the short term we might need to retune some governor control systems to compensate for a lighter system – that is all. An additional benefit is that this will also address many of the issues that the FCAS market has caused relating to the recent deterioration of frequency control.
In the longer term we need to ensure new renewable technologies can contribute to frequency control, but this is only important if we disconnect many of the synchronous generators which currently make up 90% of our grid. It is an upcoming issue but the time frame for this is 20 – 30 years, not one.
If we do this, we won’t need to mandate inertia limits for various regions of the system.
Bruce is an Electrical Engineer and senior advisor at Advisian. This article was first published on his LinkedIn page. Reproduced with permission of the author.






